|
| El sexto SA-330 de pre-producción (F-ZWWN) fue equipado con un tren de aterrizaje con orugas. Fuente: Airbus |
Los helicópteros resultan ideales para operaciones militares, no solo por su versatilidad, si no por la capacidad que tienen de operar desde cualquier superficie plana; ya sea un pedazo de tierra, la cubierta de un buque o la terraza de un edificio.
Pero la Aviación Ligera del Ejército Francés (ALAT), tenía algo diferente en mente cuando desarrollaban el Aérospatiale SA-330 Puma, a finales de los 60. Uno de sus requerimientos, era que la aeronave debía ser capaz de desplazarse en tierra por sus propios medios, con el rotor apagado; pudiendo plegar las palas de su rotor principal para ser camuflado bajo los árboles.
El plegado de las palas era relativamente sencillo de solucionar, pero el resolver el desplazamiento en tierra, no tanto. La primera solución propuesta, a su vez era la sugerencia de la ALAT, era equipar el tren principal con orugas.
 |
| El sistema para el plegado del rotor era manual y requería de tres hombres para su operación. Créditos a quien corresponda. |
Este tren fue montado y probado en el sexto Puma de pre-producción (registro civil: F-ZWWN); pero las pruebas demostraron que era un sistema frágil, que incrementaba el peso de la aeronave en 200 kg además de tener un costo de producción prohibitivo.
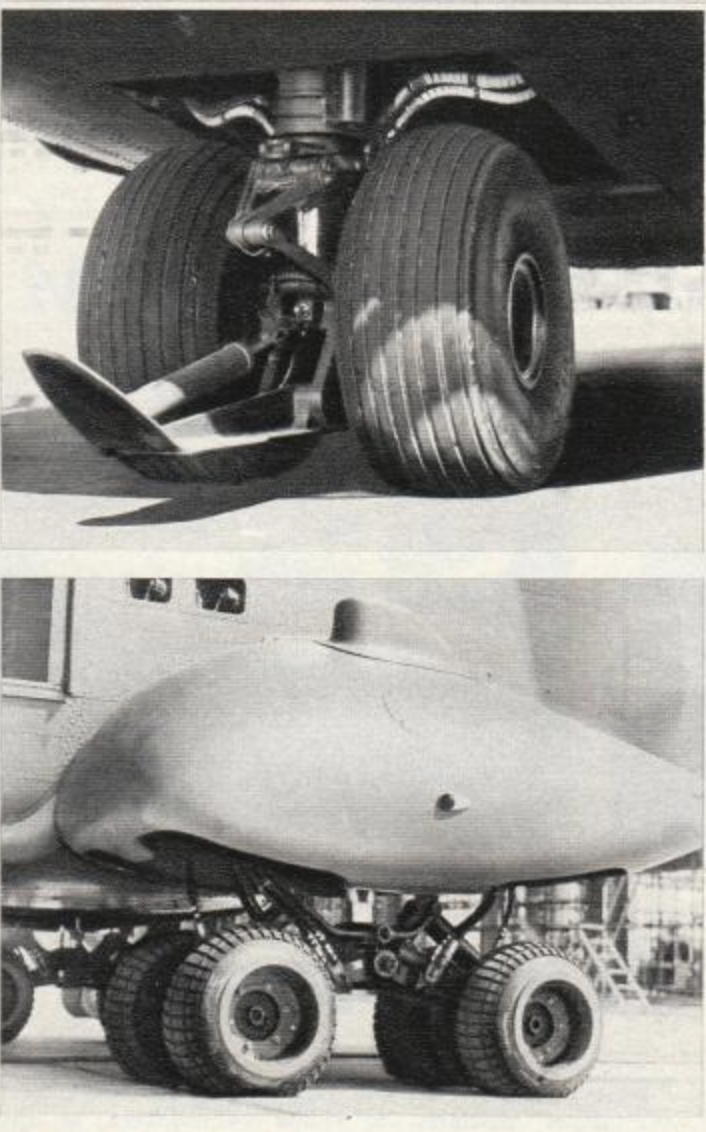
Sin embargo la ALAT exigía que este requerimiento se cumpliera, por lo que Mercier el fabricante del tren, experimentó con una segunda alternativa; esta vez, el tren principal estaría equipado de cuatro ruedas cada uno motorizadas por un motor hidráulico. El tren de aterrizaje delantero estaba equipado con una pala para remover obstáculos.
 |
Mercier, el fabricante del tren de aterrizaje, desarrolló este equipado con orugas de goma y motores hidráulicos.
Fuente: Le Puma de L'Armee Française |
Nuevamente F-ZWWN fue el banco de pruebas y con esta configuración era capaz de desplazarse a 4 km/h hacia delante o hacia atrás sobre terreno lodoso, blando o arena; salvar zanjas de 50 cm de ancho y con una pendiente de hasta 10%.
Pero el alto mando no estaba satisfecho ya que consideraba esta performance como muy pobre, además de tener una mala adherencia al suelo y había problemas para mantener a los motores hidráulicos generando el mismo torque; sin contar que el costo de esta ingeniosa solución era astronómico.
 |
| Detalle de la segunda configuración propuesta por Aerospatiale y Mercier. Fuente: Aviation Magazine International |
La ALAT permaneció firme e insistió que se buscara una tercera solución práctica y económica. Esta nueva propuesta consistía en solamente modificar el tren de aterrizaje delantero, de esta manera la aeronave sería capaz de desplazarse sobre cualquier terreno a una velocidad de 5 km/h, salvar obstáculos de 25% de pendiente y aterrizar en autorotación a velocidades de entre 80 a 100 km/h.
 |
| F-ZWWN equipado con la segunda propuesta de tren de aterrizaje motorizado. Notar la pala barredora de obstáculos en el tren delantero. Fuente: Le Puma de L'Armee Française |
Finalmente esta idea cumplió con los mínimos requerimientos de la ALAT, pero debido a la escalada de costos que esto estaba implicando para el desarrollo del Puma, el Estado Mayor del Ejército (EMAT) decidió en enero de 1969, abandonar la idea y conformarse con el tren de aterrizaje convencional.
Dos meses más tarde, la Comisión Ministerial de Armamentos instó al EMAT a terminar el desarrollo de la tercera propuesta (la del tren delantero motorizado), pero este se niega al argumentar que no financiaría dicho estudio; de esta manera el proyecto es abandonado definitivamente.
Fuentes